Transformations
- Transformations
- Translation
- Homogeneous Coordinates
- Scaling
- Rotation
- Transformation in OpenGL
- Model, View, Projection
- Current state Manipulation
- Cube Example
- Robotic Arm
- First Exercise
- Section Demo
Transformations
Changing object
- Position
- Size
- Orientation
- Shape
Transformation is basically a matrix multiplication process and it represents the core of computer graphics.
Translation
Changing position of the object
\(x' = x + t_x\) \(y' = y + t_y\)
\[\begin{bmatrix} x' \\ y' \end{bmatrix} = \begin{bmatrix} x \\ y \end{bmatrix} + \begin{bmatrix} t_x \\ t_y \end{bmatrix}\]![]()
Homogeneous Coordinates
-
Adding additional dimension (Projection dimension) to current coordinate system
-
2D Cartesian coordinate (x, y) maps to (x, y, w) homogeneous coordinate
-
3D Cartesian coordinate (x, y, z) maps to (x, y, z, w) homogeneous coordinate For w = 1 homogeneous coordinates is equivalent to cartesian coordinates

Advantages of homogeneous coordinates
- Make a standard (4x4) matrix shape for all vector operations including
- Translation
- Rotation
- Scaling
- Perspective Projection (Projection lecture)
- Sequence of operation will be represented as a single matrix that will be multiplied by the vector or points.
Translation in Homogeneous coordinates
Let w = 1 for now Transformation matrix is 4x4 matrix
\[\begin{bmatrix} x' \\ y' \\ z' \\ 1 \end{bmatrix} = \begin{bmatrix} 1 & 0 & 0 & t_x \\ 0 & 1 & 0 & t_y \\ 0 & 0 & 1 & t_z \\ 0 & 0 & 0 & 1 \end{bmatrix} \begin{bmatrix} x \\ y \\ z \\ 1 \end{bmatrix}\]Scaling
Multiplying by a scale factor
\[\begin{bmatrix} x' \\ y' \\ z' \\ 1 \end{bmatrix} = \begin{bmatrix} S_x & 0 & 0 & 0 \\ 0 & S_y & 0 & 0 \\ 0 & 0 & S_z & 0 \\ 0 & 0 & 0 & 1 \end{bmatrix} \begin{bmatrix} x \\ y \\ z \\ 1 \end{bmatrix}\]
Fixed point scaling
- Scaling operation includes translation
- It will affect the position of the object and this is undesired effect
- Scaling must be independent of translation.
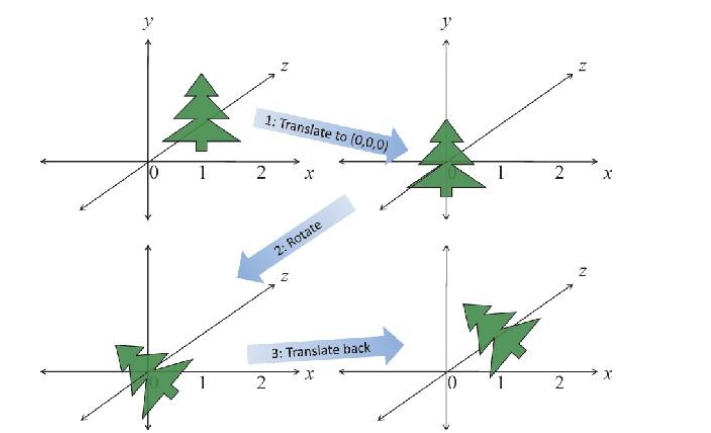
Solution
- Select a point to be fixed
- Translate it to origin (So multiplying by zero is zero)
- Apply scaling
- Translate back to that point

Rotation
For anticlockwise rotation in 2D coordinates
\[x' = xcos(\theta) - y sin(\theta)\] \[y' = xsin(\theta) + y cos(\theta)\]For 3D rotation we need to specify rotation access
\[R_z(\theta) = \begin{bmatrix} x' \\ y' \\ z' \\ 1 \end{bmatrix} = \begin{bmatrix} cos(\theta) & -sin(\theta) & 0 & 0 \\ sin(\theta) & cos(\theta) & 0 & 0 \\ 0 & 0 & 1 & 0 \\ 0 & 0 & 0 & 1 \end{bmatrix} \begin{bmatrix} x \\ y \\ z \\ 1 \end{bmatrix}\]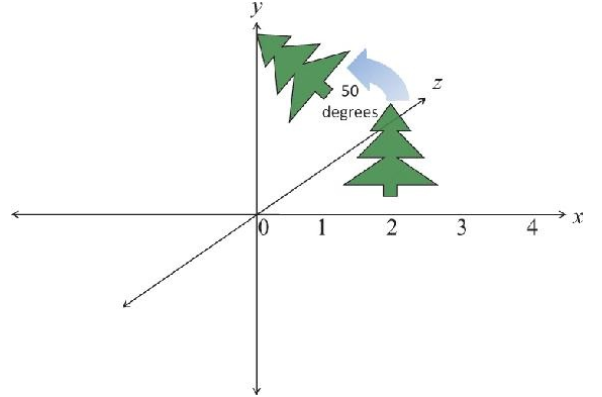
Fixed Point Rotation
- Same concept as fixed point scaling
- Select a point to be fixed during rotation Apply the following transformation matrices
- Where T is the translation of selected fixed point to origin.
 Notes :
Notes :
- Rotation matrix is orthogonal
- Reflection is 180 degree rotation.
Transformation in OpenGL
- OpenGL is a state Machine
- There is a Current matrix (CM) that holds the current state
- There is a stack to save different states to use it when needed.
- glTranslate — multiply the current matrix by a translation matrix (CM = CM*T)
- glScale — multiply the current matrix by a Scaling matrix (CM = CM*S)
- glRotate — multiply the current matrix by a Rotation matrix (CM = CM*R)
Note :
Post multiplication is applied (Right side not left side)
Model, View, Projection
- In World coordinates (Object) we draw our model
- In view coordinate we put it in camera coordinates
- In projection coordinates 3D object is projected on screen coordinate
- We handle this in openGL by setting this matrix mode sequence
glMatrixMode(GL_PROJECTION);
glMatrixMode(GL_MODELVIEW);
More about this in next lectures

Current state Manipulation
- To save the current state
glPushMatrix() - To restore that state
glPopMatrix()To reset your current matrix
glLoadIdentity()
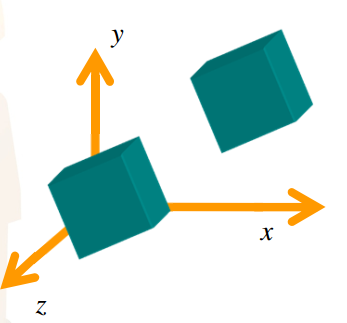
Cube Example
Translation and rotation Which first ?
Robotic Arm
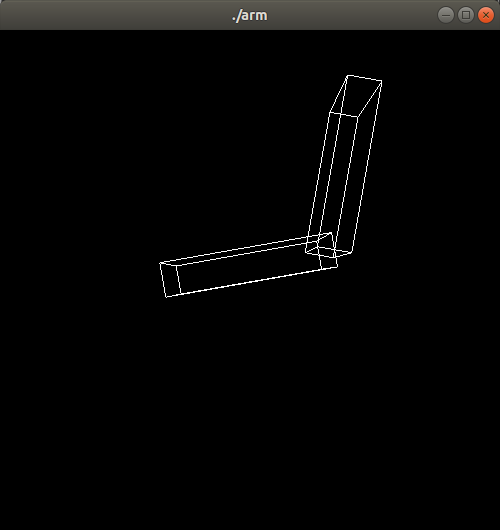
First Exercise
- Complete the robotic arm
- Draw its fingers

Section Demo
All demos will be available in this repository