Week 3: Euler's Identity, Sinusoids, and Fourier
These notes are inspired by Mathematics of the Discrete Fourier Transform (DFT)
Readings
- Complex Numbers
- Proof of Euler’s Identity
- In-Phase & Quadrature Sinusoidal Components
- The DFT
- DFT matrix
Euler’s Identity
\[e^{j\theta} = \cos(\theta) + j\sin(\theta) \qquad\qquad \mbox{(Euler's Identity)}\]Properties of Exponents
$ a^{n_1} a^{n_2} = a^{n_1 + n_2} $
$ \left(a^{n_1}\right)^{n_2} = a^{n_1 n_2} $
The Exponent Zero
$ a^0 a = a^0 a^1 = a^{0+1} = a^1 = a $
$ a^0 a = a $
$ {a^0 = 1.} $
Negative Exponents
$ a^{-1} \cdot a = a^{-1} a^1 = a^{-1+1} = a^0 = 1. $
$ {a^{-1} = \frac{1}{a}.} $
$ {a^{-M} = \frac{1}{a^M}} $
Rationale Exponents
A rational number is a real number that can be expressed as a ratio of two finite integers:
\[\displaystyle x = \frac{L}{M}, \quad L\in\mathbb{Z},\quad M\in\mathbb{Z}\]Applying property (2) of exponents, we have
\[\displaystyle a^x = a^{L/M} = \left(a^{\frac{1}{M}}\right)^L.\]Thus, the only thing new is \(a^{1/M}\) . Since
\[\displaystyle \left(a^{\frac{1}{M}}\right)^M = a^{\frac{M}{M}} = a\]we see that \(a^{1/M}\) is the \(M\) th root of \(a\) . This is sometimes written
\[{a^{\frac{1}{M}} = \sqrt[M]{a}.}\]e^(j theta)
We’ve now defined $ a^z$ for any positive real number $ a$ and any complex number $ z$ . Setting $ a=e$ and $ z=j\theta$ gives us the special case we need for Euler’s identity. Since $ e^x$ is its own derivative, the Taylor series expansion for $ f(x)=e^x$ is one of the simplest imaginable infinite series:
\[e^x = \sum_{n=0}^\infty \frac{x^n}{n!} = 1 + x + \frac{x^2}{2} + \frac{x^3}{3!} + \cdots\]The simplicity comes about because $ f^{(n)}(0)=1$ for all $ n$ and because we chose to expand about the point $ x=0$ . We of course define
$\displaystyle e^{j\theta} = \sum_{n=0}^\infty \frac{(j\theta)^n}{n!} = 1 + j\theta - \frac{\theta^2}{2} - j\frac{\theta^3}{3!} + \cdots \,. $
Note that all even-order terms are real while all odd-order terms are imaginary. Separating out the real and imaginary parts gives
\[\mbox{Re} \big\{e^{j\theta}\big\} = 1 - \frac{\theta^2}{2} + \frac{\theta^4}{4!} - \cdots\] \[\mbox{Im} \big\{e^{j\theta}\big\} = \theta - \frac{\theta^3}{3!} + \frac{\theta^5}{5!} - \cdots\\]Polar form
$\displaystyle z = r e^{j\theta} $
In-Phase & Quadrature Sinusoidal Components
From the trig identity $ \sin(A+B)=\sin(A)\cos(B)+\cos(A)\sin(B)$ , we have
\[\begin{eqnarray*} x(t) &= & A \sin(\omega t + \phi) = A \sin(\phi + \omega t) \\ &=& \left[A \sin(\phi)\right] \cos(\omega t) + \left[A \cos(\phi)\right] \sin(\omega t) \\ &= & A_1 \cos(\omega t) + A_2 \sin(\omega t). \end{eqnarray*}\]From this we may conclude that every sinusoid can be expressed as the sum of a sine function (phase zero) and a cosine function (phase $ \pi/2$ ). If the sine part is called the in-phase component, the cosine part can be called the phase-quadrature component. In general, phase quadrature means 90 degrees out of phase, i.e., a relative phase shift of $ \pm\pi/2$.
It is also the case that every sum of an in-phase and quadrature component can be expressed as a single sinusoid at some amplitude and phase. The proof is obtained by working the previous derivation backwards.
Complex Sinusoids in Frequency Domain
$\displaystyle x(t) = A_x e^{j\omega_x t} $

Fourier Analysis
Fourier analysis is the process of decomposing a function into simple sinusoids known as basis functions.
$\displaystyle X(\omega_k) = \sum_{n=0}^{N-1}x(n) e^{-j\omega_k t_n} = \sum_{n=0}^{N-1}x(n) e^{-j 2\pi kn/N}, \quad k=0,1,2,\ldots N-1 $
\(t_n = nT = \mbox{$n$th sampling instant (sec)}\) \(\omega_k = k\Omega = \mbox{$k$th frequency sample (rad/sec)}\) \(T = 1/f_s = \mbox{time sampling interval (sec)}\) \(\Omega = 2\pi f_s/N = \mbox{frequency sampling interval (rad/sec)}\)
The transform kernel:
$\displaystyle e^{-j\omega_k t_n} = \cos(\omega_k t_n) - j \sin(\omega_k t_n) $
Inner Product = Projection
$ X(\omega_k)$ , the DFT at frequency $ \omega_k$ , is a measure of the amplitude and phase of the complex sinusoid which is present in the input signal $ x$ at that frequency.
Signals: Vector View
A signal consists of $N $ samples, is equivalent to a two-dimensional vector. Each sample is a corrdinate in the N-dimensional space.
We already have that intuition when carrying signals in Numpy arrays, just as vectors.
DFT not decomposing into sinusoids
DFT decompose singals up into complex exponentials.
DFT Matrix
The transformation matrix W can be defined as \(W = \left( \frac{\omega^{jk}}{ \sqrt{N} } \right )_{\{j,k=0,\ldots ,N-1\}}\),
or equivalently:
\[{\displaystyle W={\begin{bmatrix}1&1&1&1&\cdots &1 \\ 1&\omega &\omega ^{2}&\omega ^{3}&\cdots &\omega ^{N-1} \\ 1&\omega ^{2}&\omega ^{4}&\omega ^{6}&\cdots &\omega ^{2(N-1)} \\ 1&\omega ^{3}&\omega ^{6}&\omega ^{9}&\cdots &\omega ^{3(N-1)}\\ \vdots &\vdots &\vdots &\vdots &\ddots &\vdots \\ 1&\omega ^{N-1}&\omega ^{2(N-1)}&\omega ^{3(N-1)}&\cdots &\omega ^{(N-1)(N-1)}\end{bmatrix}},}\]where {\displaystyle \omega =e^{-2\pi i/N}}
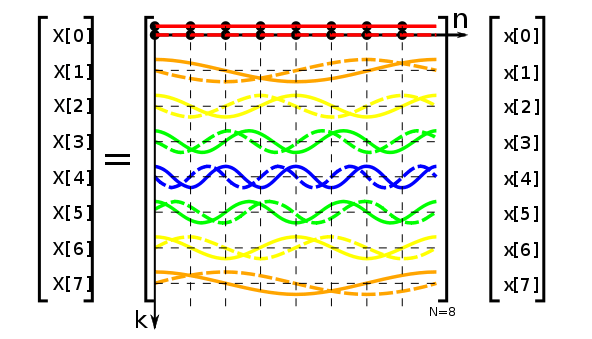
The following summarizes how the 8-point DFT works, row by row, in terms of fractional frequency:
- 0 measures how much DC is in the signal
- −1/8 measures how much of the signal has a fractional frequency of +1/8
- −1/4 measures how much of the signal has a fractional frequency of +1/4
- −3/8 measures how much of the signal has a fractional frequency of +3/8
- −1/2 measures how much of the signal has a fractional frequency of +1/2
- −5/8 measures how much of the signal has a fractional frequency of +5/8
- −3/4 measures how much of the signal has a fractional frequency of +3/4
- −7/8 measures how much of the signal has a fractional frequency of +7/8
Examples
Two-point
The two-point DFT is a simple case, in which the first entry is the DC (sum) and the second entry is the AC (difference).
\[\{\displaystyle {\begin{bmatrix}1 & 1 \\ 1 & -1 \end{bmatrix}}\}\]The first row performs the sum, and the second row performs the difference.
The factor of $ 1/{\sqrt{2}} $ is to make the transform unitary (see below). Four-point
The four-point DFT matrix is as follows:
\[\displaystyle W={\begin{bmatrix}\omega^{0} & \omega^{0} & \omega^{0} & \omega^{0}\\ \omega^{0} & \omega^{1}&\omega^{2} & \omega^{3} \\ \omega^{0} & \omega^{2} & \omega^{0} & \omega^{2} \\ \omega^{0} & \omega^{3} & \omega^{2} & \omega^{1} \\ \end{bmatrix}} = { \begin{bmatrix} 1 & 1 & 1 & 1 \\ 1 & -i & -1 & i \\ 1 & -1 & 1 & -1 \\ 1 & i & -1 & -i \end{bmatrix}}\]where $ {\displaystyle \omega =e^{-{\frac {\pi i}{2}}}=-i} $. Eight-point
The first non-trivial integer power of two case is for eight points:
\[\displaystyle W={\begin{bmatrix}\omega ^{0}&\omega ^{0}&\omega ^{0}&\omega ^{0}&\omega ^{0}&\omega ^{0}&\omega ^{0}&\omega ^{0} \\ \omega ^{0}&\omega ^{1}&\omega ^{2}&\omega ^{3}&\omega ^{4}&\omega ^{5}&\omega ^{6}&\omega ^{7} \\ \omega ^{0}&\omega ^{2}&\omega ^{4}&\omega ^{6}&\omega ^{0}&\omega ^{2}&\omega ^{4}&\omega ^{6} \\ \omega ^{0}&\omega ^{3}&\omega ^{6}&\omega ^{1}&\omega ^{4}&\omega ^{7}&\omega ^{2}&\omega ^{5}\\ \omega ^{0}&\omega ^{4}&\omega ^{0}&\omega ^{4}&\omega ^{0}&\omega ^{4}&\omega ^{0}&\omega ^{4} \\ \omega ^{0}&\omega ^{5}&\omega ^{2}&\omega ^{7}&\omega ^{4}&\omega ^{1}&\omega ^{6}&\omega ^{3}\\\omega ^{0}&\omega ^{6}&\omega ^{4}&\omega ^{2}&\omega ^{0}&\omega ^{6}&\omega ^{4}&\omega ^{2} \\ \omega ^{0}&\omega ^{7}&\omega ^{6}&\omega ^{5}&\omega ^{4}&\omega ^{3}&\omega ^{2}&\omega ^{1} \\ \end{bmatrix}}={\begin{bmatrix}1&1&1&1&1&1&1&1 \\ 1&\omega &-i&-i\omega &-1&-\omega &i&i\omega \\ 1&-i&-1&i&1&-i&-1&i \\ 1&-i\omega &i&\omega &-1&i\omega &-i&-\omega \\ 1&-1&1&-1&1&-1&1&-1 \\ 1&-\omega &-i&i\omega &-1&\omega &i&-i\omega \\ 1&i&-1&-i&1&i&-1&-i \\ 1&i\omega &i&-\omega &-1&-i\omega &-i&\omega \\ \end{bmatrix}}\]where
$ \omega = e^{-{\frac{2\pi i}{8}}} = \frac{1}{\sqrt{2}} - \frac{i}{\sqrt{2}} $
(Note that $\omega^{8 + n} = \omega^{n}$.)
References
- Digital Signal Processing, 2nd Edition, Fundamentals and Applications. Authors: Li Tan Jean Jiang.
- Signals and Systems using MATLAB. by Luis Chaparro Ph.D. University of California Berkeley.
- Mitra Digital Signale Processing, Computer Based Approach.
- Oppenheim Discrete-Time Signal Processing.
New Task: Writing Python/MATLAB Wrappers for C/C++
Hints
- Boost.Python
- Wrapping C/C++ for Python
- How to use C library in python? (Generating Python wrappers for C library)
- Build MEX function from C/C++ or Fortran source code
Demo file
$ git clone https://github.com/sbme-tutorials/sbe309-week3-demo.git